Phase Plane Analysis of One-.
phaseR 
Phase plane analysis of one- and two-dimensional autonomous ODE systems
![]()
![]()

![]()
Description
phaseR provides functions to perform a qualitative analysis of one- and two-dimensional autonomous ordinary differential equation (ODE) systems, using phase plane methods. Programs are available to identify and classify equilibrium points, plot the direction field, and plot trajectories for multiple initial conditions. In the one-dimensional case, a program is also available to plot the phase portrait. Whilst in the two-dimensional case, programs are additionally available to plot nullclines and stable/unstable manifolds of saddle points. Many example systems are provided for the user.
Getting started
You can install the released version of phaseR from CRAN with:
install.packages("phaseR")
Alternatively, the latest development version available from GitHub can be installed with:
devtools::install_github("mjg211/phaseR")
An introductory example of how to make use of the package’s core functionality can be found below. More detailed support is available in the package vignette, which can be accessed with vignette("introduction", package = "phaseR"). For further help, please contact Michael Grayling at [email protected].
Example
As a basic example, we consider analysing the non-linear two-dimensional system of ODEs provided in phaseR via example12(). By hand, we typically first locate the nullclines and then identify the equilibrium points. Following this, we produce a plot from which trajectories can be sketched. This can all be seamlessly carried out in phaseR with:
example12_flowField <- flowField(example12,
xlim = c(-4, 4),
ylim = c(-4, 4),
add = FALSE)
example12_nullclines <- nullclines(example12,
xlim = c(-4, 4),
ylim = c(-4, 4),
points = 500)
y0 <- matrix(c( 2, 2,
-3, 0,
0, 2,
0, -3),
nrow = 4,
ncol = 2,
byrow = TRUE)
example12_trajectory <- trajectory(example12,
y0 = y0,
tlim = c(0, 10))
#> Note: col has been reset as required
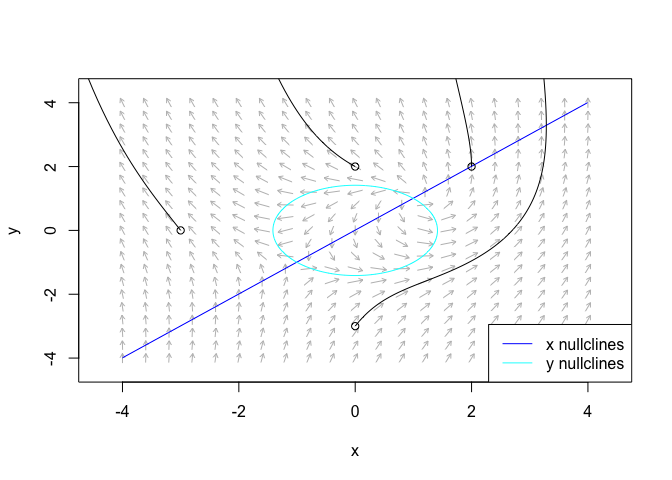 It appears that both of the equilibria are unstable. We could verify this by hand, but we can also perform this analysis in phaseR using
It appears that both of the equilibria are unstable. We could verify this by hand, but we can also perform this analysis in phaseR using stability():
example12_stability_1 <- stability(example12,
ystar = c(1, 1))
#> tr = 3, Delta = 4, discriminant = -7, classification = Unstable focus
example12_stability_2 <- stability(example12,
ystar = c(-1, -1),
h = 1e-8)
#> tr = -1, Delta = -4, discriminant = 17, classification = Saddle
References
Grayling MJ (2014) phaseR: An R package for phase plane analysis of autonomous ODE systems. The R Journal 6(2):43-51. DOI: 10.32614/RJ-2014-023.